用途工控传动
品牌kollmorgen
电压可选
电流可选
工作温度可选
美国科尔摩根是运动控制领域的:凭借我们在电磁理论与控制方面深厚的实践知识,我们占据得天厚的优势,能够帮助您满足严苛的电机和运动控制要求。
我们的客户是许多行业的和创新者,例如航空航天、印刷包装、食品和饮料加工、影像、体外诊断和实验室自动化、制药、材料成型和切割、石油和天然气、及机器人等。
科尔摩根也是仓储自动化的,其应用范围包括自动引导车辆系统(AGV)、软件、任务感知和自主化作业。
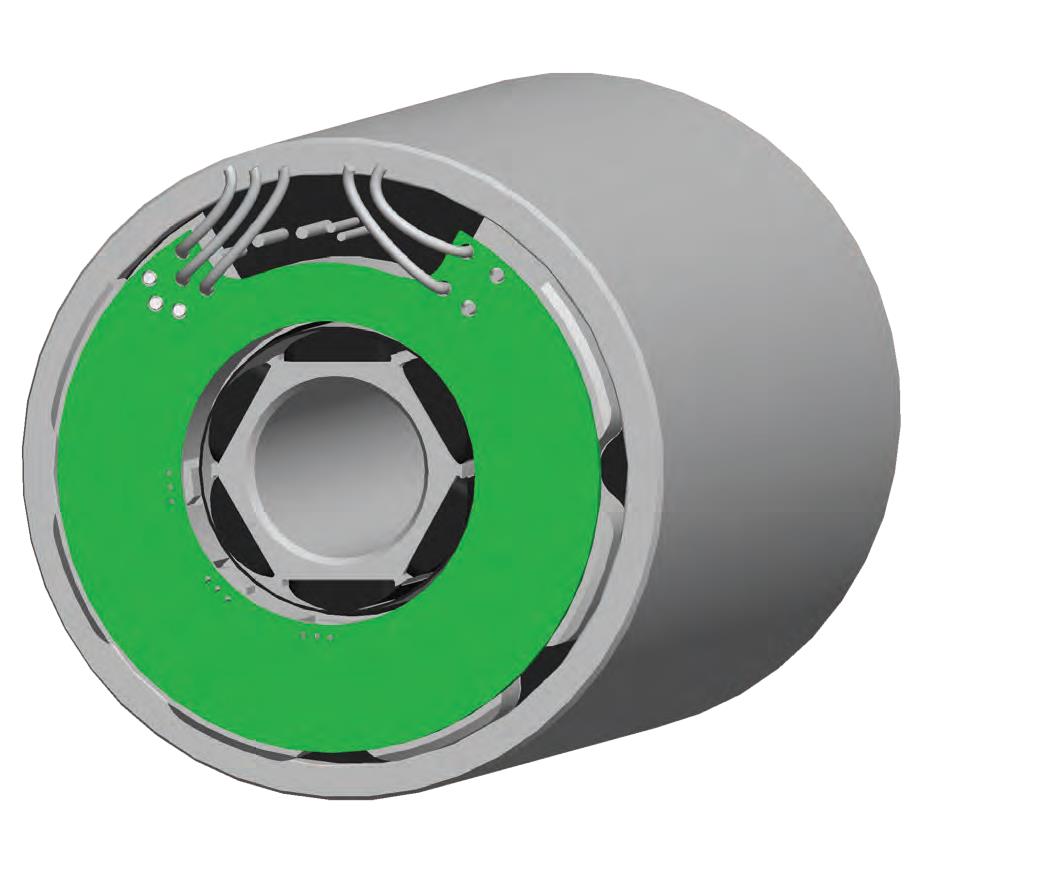
kollmorgenRGM机器人关节模组
特点
48VDC
采用设计的新型无框架直驱力矩电机
4种谐波减速器规格,方便选型
双反馈系统,包含电机换相用增量编码器,减速机输出端用单圈编码器
集成紧凑型低压直流驱动器
采用断电式制动器,由内驱电子部件控制
选件
机器人末端执行器的标准工具安装选项,包括标准机械接口和电气接口
基于CANopen通讯协议的驱动器,计划增加EtherCAT通讯协议选项
优点
采用全新高性能无框伺服电机,结合谐波减速器,发挥效率并**高质量稳定运行
扭矩达到谐波减速器的峰值性能
实现更大的连续转矩输出,同时有效控制电机温升和谐波减速器温升,**整体使用寿命
L形外壳,方便与底座和手臂安装连接
机框尺寸重量直径高度长度峰值转矩额定转矩速度
(Kg)(mm)(mm)(mm) (Nm) (Nm) (rpm)
RGM14 1.57995120 34 19 35
RGM17 290105 123 66 38 30
RGM20 2.8102117127 102 56 25
RGM25 3.4127145131 194 12525
作为业界的协作机器人电机供应商,RGM机器人关节模组是科尔摩根专为10Kg以下协作机器人而设计,
高度集成了包括无框直驱力矩电机、低压直流驱动器、谐波减速机、制动器和双反馈装置。尺寸小,
符合协作机器人紧凑、灵活的设计特点。
融合了科尔摩根丰富的机器人领域经验,RGM通过高度集成的一体化设计,降低客户对机械选型、设计、
组装多个环节的人员和时间投入,简化供应链管理及质量管理综合成本,实现机器人产品快速上市。让协作机器人开发变得
,快速,便捷。
采用高度集成化设计的RGM机器人关节模组,在拳头大小的紧凑的空间内,
集成了机器人关节所需的功能模块。此外,集成化设计地减少了机器人关节的重量
,以5公斤负载协作机器人组合为例,采用RGM后6个关节仅重12.9公斤,有效保证机器人合理自重比。
在追求“**轻量级”的过程中,RGM机器人关节模组坚持采用配置,
采用电磁设计理念的力矩电机功率密度更高,额定转矩**出市场产品48%。内置驱动器采用48VDC供电,
可在电流环,速度环和位置环以高刷新率操作运行,并配备控制失电保护闸。
双反馈系统有助于力控和拖动示教的实现,关节的输出端反馈重复精度高达0.001°。
适配,经久耐用
协作机器人关节不仅要求“小身材”,还要求“大出力”
即关节转矩输出达到谐波减速机的峰值性能。RGM额定转矩的输出,
基于力矩电机和谐波减速机的率匹配设计,实现了输出功率大,同时有效控制电机和谐波减速机温升
,不**过减速机长期运行温度的要求,**关节寿命。另外,关节内集成了双热敏传感器,
分别位于电机绕组和谐波减速机处,且连入驱动器。温控报警信号可以通过总线发送至控制器,
便于机器人寿命和管理。
一步到位、开放灵活
RGM机器人关节模组拥有四种规格(14,17,20,25),机器人厂商可以根据不同轴数和运动要求,
在RGM选型工具上轻松挑选出合适的机器人关节模组。此外,RGM的安装快速简单,通常两个工程师在半天内即可完成.
采用RGM机器人关节模组,机器人厂商摆脱了在搭建硬件平台过程中的种种问题,*再对上百种机械电子器件进行选型
、设计和组装,投入的人力和时间大为减少,供应链管理和质量管理综合成本显著降低。
RGM机器人关节可以配合众多主流机器人控制器使用,确保机器人厂商可以在该平台基础之上关注设计和开发机器人控制系统,
软件算法,安全功能和应用方案实施。这一特性使机器人厂商能够快速实现机器人的功能化要求和实用化目标,
帮助他们制造出更有竞争力和差异化的机器人。
“RGM机器人关节模组由美国设计,中国生产。”
科尔摩根中国及东南亚地区产品经理王唯唯谈到,
“在整个开发过程中,我们与五十多家机器人厂商进行了深入沟通和探讨,
不断修正和改进产品功能配置,确保新产品高度契合市场需求。**的设计能力,
本土化生产和业内的产品质量,确保我们能更好地满足客户对于性能、质量和交期的要求。”
凭借对协作机器人的深刻理解和丰富经验,科尔摩根以其洞见和雄厚技术,推出了开创性的RGM机器人关节模组。
科尔摩根期待通过该产品的面世,能降低关节机器人制造的门槛,帮助中国机器人厂商推出更具有竞争力的国产协作机器人和轻型机器人
,改变机器人产业的格局
型号:RGM14
RGM17
RGM20
RGM25
产品应用:
1)协作机器人
2)双足机器人
3)四足机器人
4)多关节机器人
5)外骨骼机器人
6)机械臂
7)航空航天
8)无人机

kollmorgen 科尔摩根TKM 系列有框力矩电机
kollmorgenTKM 大力矩电机
当前,工业领域的目标是节省能源成本、降低生产损耗的同时,提高生产率,并改善运动控制精度,以提品生产率。
对于低速、无齿轮箱的直接驱动应用,kollmorgen 科尔摩根TKM 系列有框力矩电机可以提供高性能的解决方案。TKM系列力矩电机效率损耗低,框架设计紧凑却能输出高的转矩。作为低速、高转矩的电机,TKM不受负载影响,从静止至额定速度保持恒定转矩,因而适合众多负载应用。同时,TKM力矩电机因其低转动惯量而灵活性,高数设计又使该电机易于控制。此外,TKM力矩电机可以迅速加速,并且工作时具备高稳定性,是高性能应用的理想之选。
1)直接驱动负载,提高机器的精度、效率和生产率;
2)低转速,高转矩输出,额定转矩高达3060Nm;
3)数高达88,实现高度灵活性和良好操控性;
4)适合持续出力、位置分度等多种应用;
5)*减速机,消除背隙的同时,降低噪音;
6)IP54级外壳,*额外的冷却装置。
设计特点:
1)业界的电机转矩密度
2)电机效率高
3)高动态性能
4)低齿槽效应
5)跟随性能良好
6)良好的可控性
7)高过载能力
8)静音运行
9)免维护
10)消除了所有与变速箱相关的问题,比如齿隙、漏油、维护、噪声
应用:
1) 挤出机
2) 注塑机
3) 主-从应用
4) 动态定位
5) 大体积低转速风扇
6) 输送机,特别是配有启停技术的输送机
7) 电梯
8) 伺服压力机技术
9) 齿槽冲头
10)飞锯
11)回转工作台
12)生产线定制长度应用(纸张,塑料,金属等)
13)卷纸、纸张、金属板、电缆等的收放
14)粘性液体低速搅拌机
15)启停式机械
16)以及您可以用在把伺服电机作为直驱电机的任何场合
具体应用:
1)塑料挤出机
*减速机和传动结构
运行速度更稳定,节能25%
2)张力控制
取代传统伺服电机和减速机,免维护
全速度段内实现的张力控制
3)柔版印刷机
取代传统伺服电机和高精度行星减速机,免维护
确保整个生命周期内的高印刷精度
4)冲压机
凭借直联技术提高30%的生产效率
*冷却环节,更节能
5)传送带
*减速机,运行更平稳
免维护,并可集成抱闸
6)搅拌机
*减速机,全速度段内恒转矩输出
有效避免润滑油泄露引起的产品质量问题,节能50%

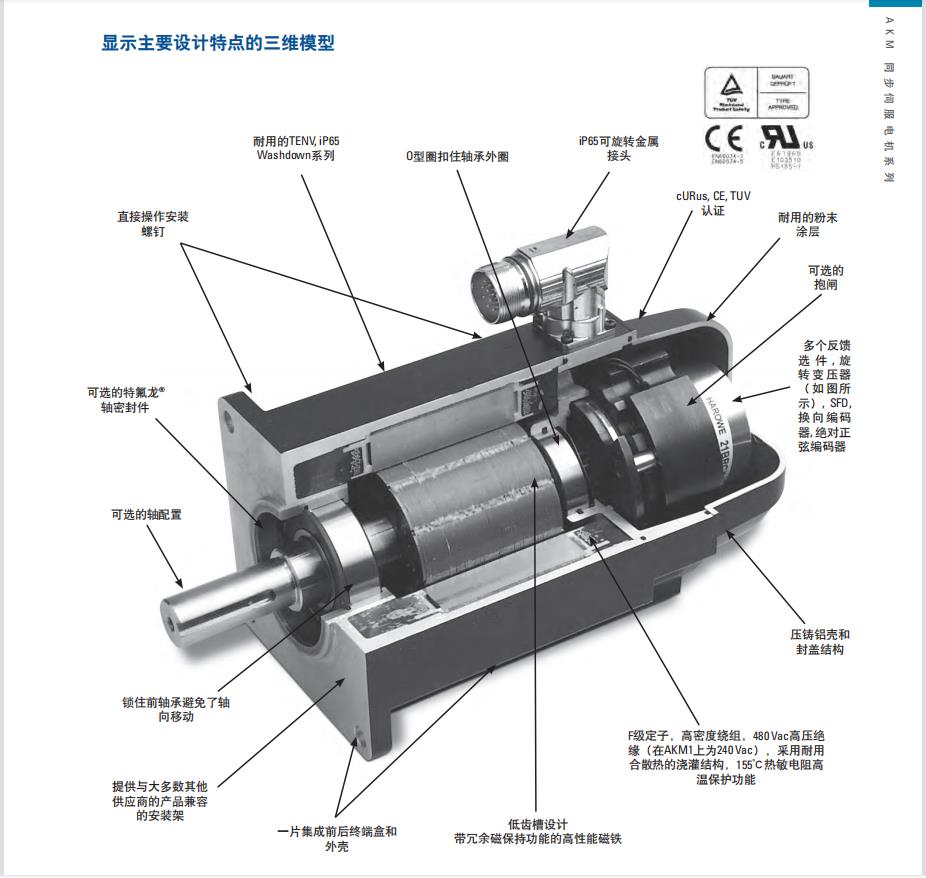
kollmorgen(科尔摩根)AKM系列伺服电机
科尔摩根AKM伺服电机拥有广泛的标准产品,为您提供了更好的选择和灵活性 – 这些产品经过优化与科尔摩根伺服驱动器配合使用,可提供更好的性能以满足您的应用需求。 如今,选择合适的运动控制产品**如此简单。 该系统包含的AKM伺服电机和驱动器都是两个的产品 – 定制解决方案拥有的规格、更短的交货期和更低的标准电机-驱动系统成本。
特点:
1)8种框架规格,28种框架/叠片组合
2)转速高达8000 RPM
3)75 VDC, 120, 240, 480 VAC 绕组
4)各种反馈设备、安装配件、密封
5)直接安装到大多数科尔摩根伺服驱动器
6)环境温度为40°C时,额定绕组温度达到100°C,同时使用155°C(F类)绝缘材料
7)cURus、CE认证、UL认证
选件:
1)反馈设备: 旋转变压器、智能反馈设备(SFD)、增量式和正弦编码器
2)用于改善环境保护的密封件
3)轴端封闭或开放键槽,平而光滑
4)双通道或单通道互连连接器,直线或可旋转
5)24 VDC安全抱闸
6)IP67防水食品级电机
我公司主要代理Kollmorgen(科尔摩根)全系列产品,涵盖了运动控制器、机器控制系统、交直流伺服驱动器、步进驱动器、调速驱动器、交直流伺服电机、步进电机、同步电机、直流电机、微型电机、特种电机、电动缸等多种产品,其中伺服电机和伺服驱动器主要包括以下系列产品:
Kollmorgen代理商
步进电机 伺服电机工作原理 伺服驱动器 伺服电机和步进电机的区别 伺服电机选型
伺服系统 伺服电机工作原理动画 伺服电机工作原理视频
控制 伺服电机与步进电机的区别 伺服驱动器 伺服电机接线图 伺服驱动器
直流伺服电机 交流伺服电机 步进电机和伺服电机区别 伺服电机工作原理

AKD高性能伺服驱动器
坚固的、技术的AKD伺服驱动器家族当与我们性能的其他部件配合使用时产生化的性能,
在的速度和更长的正常使用时间方面体现出更的特性。使用Kollmorgen伺服组件,我们能够
帮助你使你的机器的全部效能提高50%。
AKD 兼容产品
AKM无刷旋转伺服电机
Cartridge直驱旋转伺服电机
有框架直驱旋转伺服电机
无框架套件旋转伺服电机
直驱直线电机
电动缸直线定位机构
无杆执行器直线定位机构
精密平台直线定位机构
AKD 特性
Kollmorgen WorkBench图形用户界面
数字信号处理器控制
螺丝固定接线端I/O连接器
实时性能反馈
反馈装置:Smart Feedback Devices (SFD),EnDat2.2, 01, BiSS, 模拟Sine/Cos编码器, 增量编码器
, HIPERFACE?, 和旋转变压器其
用于改变负载条件的调整功能
力矩环更新0.67 μs
速度环更新62.5 μs
位置环更新125 μs
以太网运动总线:EtherCAT?, SynqNet?, Modbus/TCP, CANopen?
美国科尔摩根kollmorgenTBMS部分型号:
TBMS-6013-A00 TBMS-6013-B00
TBMS-6025-A00 TBMS-6025-B00
TBMS-6051-A00 TBMS-6051-B00
TBMS-7615-A00 TBMS-7615-B00
TBMS-7631-A00 TBMS-7631-B00
TBMS-7646-A00 TBMS-7646-B00
TBMS-12913-A00 TBMS-12913-B00
TBMS-12941-A00 TBMS-12941-B00
TBMS-12955-A00 TBMS-12955-B00
TBM-6013-A00 TBM-6013-B00
TBM-6025-A00 TBM-6025-B00
TBM-6051-A00 TBM-6051-B00
TBM-7615-A00 TBM-7615-B00
TBM-7631-A00 TBM-7631-B00
TBM-7646-A00 TBM-7646-B00
TBM-12913-A00 TBM-12913-B00
TBM-12941-A00 TBM-12941-B00
TBM-12955-A00 TBM-12955-B00
TBMS-6013, TBM-6013, TBMS-6025, TBM-6025,TBMS-6051, TBM-6051,TBMS-7615,
TBM-7615, TBMS-7631, TBM-7631, TBMS-7646, TBM-7646, TBMS-9519,TBM-9519,
TBMS-12913, TBM-12913, TBMS-12941, TBM-12941, TBMS-12955, TBM-12955
供应型号:
TBM-6013-A00 TBM-6013-B00
TBM-6025-A00 TBM-6025-B00
TBM-6051-A00 TBM-6051-B00
TBM-7615-A00 TBM-7615-B00
TBM-7631-A00 TBM-7631-B00
TBM-7646-A00 TBM-7646-B00
TBM-12913-A00 TBM-12913-B00
TBM-12941-A00 TBM-12941-B00
TBM-12955-A00 TBM-12955-B00
TBMS-6013-A00 TBMS-6013-B00
TBMS-6025-A00 TBMS-6025-B00
TBMS-6051-A00 TBMS-6051-B00
TBMS-7615-A00 TBMS-7615-B00
TBMS-7631-A00 TBMS-7631-B00
TBMS-7646-A00 TBMS-7646-B00
TBMS-12913-A00 TBMS-12913-B00
TBMS-12941-A00 TBMS-12941-B00
TBMS-12955-A00 TBMS-12955-B00
http://renishaw001.cn.b2b168.com