用途工控传动
品牌kollmorgen
电压可选
电流可选
工作温度可选
Kollmorgen(科尔摩根)隶属于美国的上市公司、世界**的Danaher集团。
Danaher Motion (运动控制)整合了30个以上的自动控制行业的
(例如,Kollmorgen、Thomson、Dover、 Pacific Scientific、Portescap、Neff、Seidel和Bautz),
建立了专注于客户的运动控制制造与服务公司,称为Danaher Motion。在Danaher Motion下我们可提供功能强大的集成运动控制技术。
我们是年销售**过10亿美元的**运动控制者,汇集几十年应用经验和技术创新,致力于帮助客户更好、更快的制造机器。Danaher Motion定义了高标准的质量、创新和技术。
我们能够在控制成本的同时提高机器性能和可靠性。我们的**制造足迹、快速定制以及原型制作能力,驱动着快速订货至交货时间。
**的应用经验和设计经验使用户能够更快速地调试机器。在当今竞争激烈的运动控制市场上,作为一个值得客户信赖的合作伙伴,
Danaher Motion**的6,100名员工凭借**过60年应用经验,加上2000多家经销商,将竭尽全力助您事业成功。Danaher Motion可服务于半导线、航天和*、电力车辆系统、包装、印刷、以及机器人等各种行业。
用户需要时,通过遍布**的服务和技术支持基础设施、现场服务工程师和技术支持团队,我们可提供一种无比深度和广度的运动控制产品解决方案。
AKD高性能伺服驱动器
坚固的、技术的AKD伺服驱动器家族当与我们性能的其他部件配合使用时产生化的性能,
在的速度和更长的正常使用时间方面体现出更高品质的特性。使用Kollmorgen伺服组件,我们能够
帮助你使你的机器的全部效能提高50%。
AKD 兼容产品
AKM无刷旋转伺服电机
Cartridge直驱旋转伺服电机
有框架直驱旋转伺服电机
无框架套件旋转伺服电机
直驱直线电机
电动缸直线定位机构
无杆执行器直线定位机构
精密平台直线定位机构
AKD 特性
Kollmorgen WorkBench图形用户界面
数字信号处理器控制
螺丝固定接线端I/O连接器
实时性能反馈
反馈装置:Smart Feedback Devices (SFD),EnDat2.2, 01, BiSS, 模拟Sine/Cos编码器, 增量编码器
, HIPERFACE?, 和旋转变压器其
用于改变负载条件的调整功能
力矩环更新0.67 μs
速度环更新62.5 μs
位置环更新125 μs
以太网运动总线:EtherCAT?, SynqNet?, Modbus/TCP, CANopen?

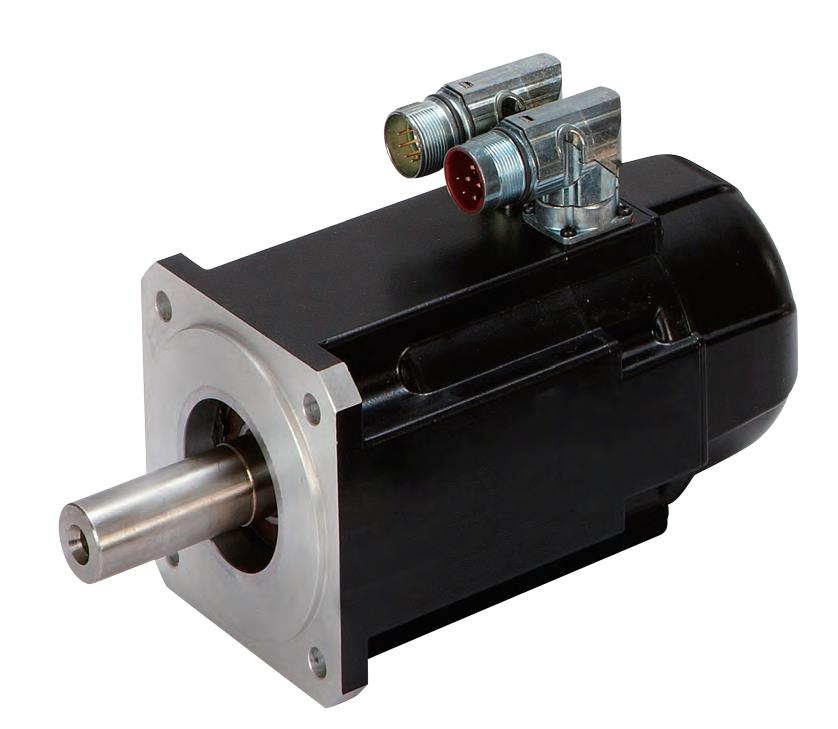
美国科尔摩根kollmorgenAKM3c防爆电机
小巧,经济,性能优异
科尔摩根AKM3C防爆电机,可在气体二区和粉尘一区使用,AKM高性能电机系列有多种安装、连接、反馈和其他选件,这些电机非常灵活,能满足各种应用需求,基于AKM平台开发的AKM防爆电机可以满足CCC的防爆标志
特点
• 6种机框尺寸(58到188毫米)
• 功率范围从 0.1Kw 到 8.58Kw
• 转速为8000rpm
• 22种机框与机架长度组合
• 72种标准绕组,可在120/240/400/480 Vac等电压下使用
• 可在零下40℃使用
• 十几种编码器选择(增量型,SFD,旋变,Biss单圈,Biss多圈,EnDat2.2单圈,EnDat2.2多圈等编码器)
应用
• 化工、石油化工和制药
• ,等加工设备
• 印刷设备等
• 喷漆设备

kollmorgen KBM系列无框力矩电机是我们推出的直接驱动器技术产品。KBM成套
型产品具有的性能,使用寿命长,安装简便,可以满足当今设计
工程师的需求。用户还可以选择闭锁型数字霍尔效应传感器,这些驱
动器器是预先校准并在工厂内安装的,增加了轴向转子长度,以确保
正确的触发机制。如果选择配备绝缘部件,还可以在多种线输入电压
下操作。我们为您提供了详细的选型指南,其中介绍了目前提供的各
种预设计选件和配置。
KBM无框电机的优势
业内的无框电机性能? 采用的电磁设计,可以达到转矩密度,减小电
机体积尺寸。
旋转非常平稳,齿槽效应非常小,总谐波畸变(THD)
很低。
操作速度范围大,加速快。
高质量的结构确保可靠性和操作? 高速电机的转子采用冗余磁体连接方式——同时采用附
着沾合及Kelvar纤维。
电机绕组温度等级为155℃,带有集成热敏电阻,可
以确保在高标准应用系统中的连续操作。
带有经UL推荐的绝缘系统,使系统更容易达到法规要求。
选择了符合RoHS指令的材料。
设计方案的可配置程度很高,降低了设计
解决方案的时间
提供了14种机框尺寸以及多种叠片段长度。
采用霍尔效应传感器实现标准传感器反馈功能。
标准高压和低压绝缘。
提供多种标准绕组,并可以根据要求提供定制绕组。
很容易调整机械接口。
高质量的结构
全封装的定子绕组
内部绕组能够在155℃下连续操作
使用PTC热敏电阻(雪崩式)实现过载保护
采用稀土钕-铁-硼磁体
转子磁体上采用故障型保护带*
符合RoHS指令要求
可用选件(不需要设计费)
传感器反馈装置(KBMS型)
闭锁型数字 霍尔效应传感器经过预先校准,并在生产时安装
至定子出线端。在此选型指南中给出了接线说明以及电气时
序图。KBMS型产品增加了轴向转子长度,以确保正确的传感
器触发机制。
选择绝缘系统
S(标准)- 可以用于规格不**过240 Vac的驱动器放大器电源
H(高压)- 用于规格**240 Vac,并且不**过480 Vac的驱动
器放大器电源
各种绕组
根据客户应用系统的具体电压和电流要求,可以通过优化电
机绕组来达到所需的速度和转矩性能。在报价之前,科尔摩
根的工程师必须确保每种绕组方案都具有电气可行性,
并且能够制造出来。
转子轮毂尺寸
转子轮毂可以按照客户规定采用各种孔型、安装功能或者较
小的内镗孔直径。在本选型指南内给出的标准KBM(S)型产品
对应转子内镗孔直径的情况。
转子轮毂材料
标准配置KBM(S)的转子轮毂是用非电镀冷轧钢制作的。如果
希望使用电镀、涂层、清洁或其它材料,那么在报价之前,
科尔摩根的工程师确保方案的可行性,并调整相应的价
格。
定子套管材料
标准配置KBM(S)-10、14、17、25、35、45、163和260型定子在
定子叠片段周围带有无涂层铝套管。如果铝定子套管需要涂
层或电镀层,那么在报价之前,科尔摩根的工程师必须确保
方案的可行性,并调整相应的价格。定子套管仅用于上述尺
寸的型号。
认证机构(UL/CE)信息
KBM(S)电机有助于帮助客户的高品质组件获取UL或CE认证。
定子绝缘系统完全是用经过认证机构核准的材料制作的,其
设计完全符合认证机构规定的漏电和电气间隙准则,并在认
证机构规定的电压下检测了绕组电路和接地金属定子表面之
间的介电强。

kollmorgenRGM机器人关节模组
特点
48VDC
采用设计的新型无框架直驱力矩电机
4种谐波减速器规格,方便选型
双反馈系统,包含电机换相用增量编码器,减速机输出端用单圈编码器
集成紧凑型低压直流驱动器
采用断电式制动器,由内驱电子部件控制
选件
机器人末端执行器的标准工具安装选项,包括标准机械接口和电气接口
基于CANopen通讯协议的驱动器,计划增加EtherCAT通讯协议选项
优点
采用全新高性能无框伺服电机,结合谐波减速器,发挥效率并**高质量稳定运行
扭矩达到谐波减速器的峰值性能
实现更大的连续转矩输出,同时有效控制电机温升和谐波减速器温升,**整体使用寿命
L形外壳,方便与底座和手臂安装连接
机框尺寸重量直径高度长度峰值转矩额定转矩速度
(Kg)(mm)(mm)(mm) (Nm) (Nm) (rpm)
RGM14 1.57995120 34 19 35
RGM17 290105 123 66 38 30
RGM20 2.8102117127 102 56 25
RGM25 3.4127145131 194 12525
作为业界的协作机器人电机供应商,RGM机器人关节模组是科尔摩根专为10Kg以下协作机器人而设计,
高度集成了包括无框直驱力矩电机、低压直流驱动器、谐波减速机、制动器和双反馈装置。尺寸小,
符合协作机器人紧凑、灵活的设计特点。
融合了科尔摩根丰富的机器人领域经验,RGM通过高度集成的一体化设计,降低客户对机械选型、设计、
组装多个环节的人员和时间投入,简化供应链管理及质量管理综合成本,实现机器人产品快速上市。让协作机器人开发变得
,快速,便捷。
采用高度集成化设计的RGM机器人关节模组,在拳头大小的紧凑的空间内,
集成了机器人关节所需的功能模块。此外,集成化设计地减少了机器人关节的重量
,以5公斤负载协作机器人组合为例,采用RGM后6个关节仅重12.9公斤,有效保证机器人合理自重比。
在追求“**轻量级”的过程中,RGM机器人关节模组坚持采用配置,
采用电磁设计理念的力矩电机功率密度更高,额定转矩**出市场产品48%。内置驱动器采用48VDC供电,
可在电流环,速度环和位置环以高刷新率操作运行,并配备控制失电保护闸。
双反馈系统有助于力控和拖动示教的实现,关节的输出端反馈重复精度高达0.001°。
适配,经久耐用
协作机器人关节不仅要求“小身材”,还要求“大出力”
即关节转矩输出达到谐波减速机的峰值性能。RGM额定转矩的输出,
基于力矩电机和谐波减速机的率匹配设计,实现了输出功率大,同时有效控制电机和谐波减速机温升
,不**过减速机长期运行温度的要求,**关节寿命。另外,关节内集成了双热敏传感器,
分别位于电机绕组和谐波减速机处,且连入驱动器。温控报警信号可以通过总线发送至控制器,
便于机器人寿命和管理。
一步到位、开放灵活
RGM机器人关节模组拥有四种规格(14,17,20,25),机器人厂商可以根据不同轴数和运动要求,
在RGM选型工具上轻松挑选出合适的机器人关节模组。此外,RGM的安装快速简单,通常两个工程师在半天内即可完成.
采用RGM机器人关节模组,机器人厂商摆脱了在搭建硬件平台过程中的种种问题,*再对上百种机械电子器件进行选型
、设计和组装,投入的人力和时间大为减少,供应链管理和质量管理综合成本显著降低。
RGM机器人关节可以配合众多主流机器人控制器使用,确保机器人厂商可以在该平台基础之上关注设计和开发机器人控制系统,
软件算法,安全功能和应用方案实施。这一特性使机器人厂商能够快速实现机器人的功能化要求和实用化目标,
帮助他们制造出更有竞争力和差异化的机器人。
“RGM机器人关节模组由美国设计,中国生产。”
科尔摩根中国及东南亚地区产品经理王唯唯谈到,
“在整个开发过程中,我们与五十多家机器人厂商进行了深入沟通和探讨,
不断修正和改进产品功能配置,确保新产品高度契合市场需求。**的设计能力,
本土化生产和业内的产品质量,确保我们能更好地满足客户对于性能、质量和交期的要求。”
凭借对协作机器人的深刻理解和丰富经验,科尔摩根以其洞见和雄厚技术,推出了开创性的RGM机器人关节模组。
科尔摩根期待通过该产品的面世,能降低关节机器人制造的门槛,帮助中国机器人厂商推出更具有竞争力的国产协作机器人和轻型机器人
,改变机器人产业的格局
型号:RGM14
RGM17
RGM20
RGM25
产品应用:
1)协作机器人
2)双足机器人
3)四足机器人
4)多关节机器人
5)外骨骼机器人
6)机械臂
7)航空航天
8)无人机
C091A-11-2105
C091A-11-2105S
C091A-12-2105S
C092A-11-2105S
C092A-12-2105S
C093A-11-2105S
C093A-11-2105S^123847
C131A-11-2105S
C132A-11-2105S
C133A-11-2105S
CH041A-13-3105S
CH042A-13-3105S
CH043A-13-3105S
CH044A-13-3105S
CH051A-13-3105S
CH052A-13-3105S
CH053A-13-3105S
CH054A-13-3105S
CH061A-13-3105S
CH062A-13-3105S
CH063A-13-3105S
CH063B-13-3105S
CH091A-11-1105S
CH091A-11-2105S
CH091A-11-2105S^120879
CH091A-11-9905S-005
CH091A-12-1105S
CH092A-11-1105S
CH092A-11-2105S
CH092A-11-2105S^123327
CH093A-11-1105S
CH093A-11-1105S^171912
CH093A-11-2105S^181985
CH093A-12-2105S
CH131A-11-1105S
CH131A-11-2105S
CH131B-11-2105S
CH132A-11-2105S
CH132B-11-2105S
CH133A-11-2105S
CH133A-91-9905S-001
http://renishaw001.cn.b2b168.com